Hello everyone,this is the miner robot,I have built for The Diamond mining challenge. This is the easiest possible solution I could think. Since I am just a newbie in this field, it was very hard for me to find a solution to this problem. I don't have high-tech tools to work with,so just tried to do what was possible using a few things.
Experience level :
1. First time working with track belts (actually bought one for this challenge).
2. Fourth Robot,first one being an obstacle avoider.
3. New to Infrared coding and decoding,learning from microM library.
4.Had two previous designs discarded.
5.Been Only 3 months till I've been a member of LMR. Before that I didn't know anything about robotics.
I am using -
1. transparent marbles as Diamonds
2. Sand and black marbles as dirt and stones.
The bot-
1.travells 3 meters from a place guided via IR signal (Can be made RF signals for larger and true bot).
2.Digs in dirt.
3.Sorts Diamonds and stones and stores the diamonds in the container,throws away stones.
4.Comes back with the diamond box guided by IR signal.
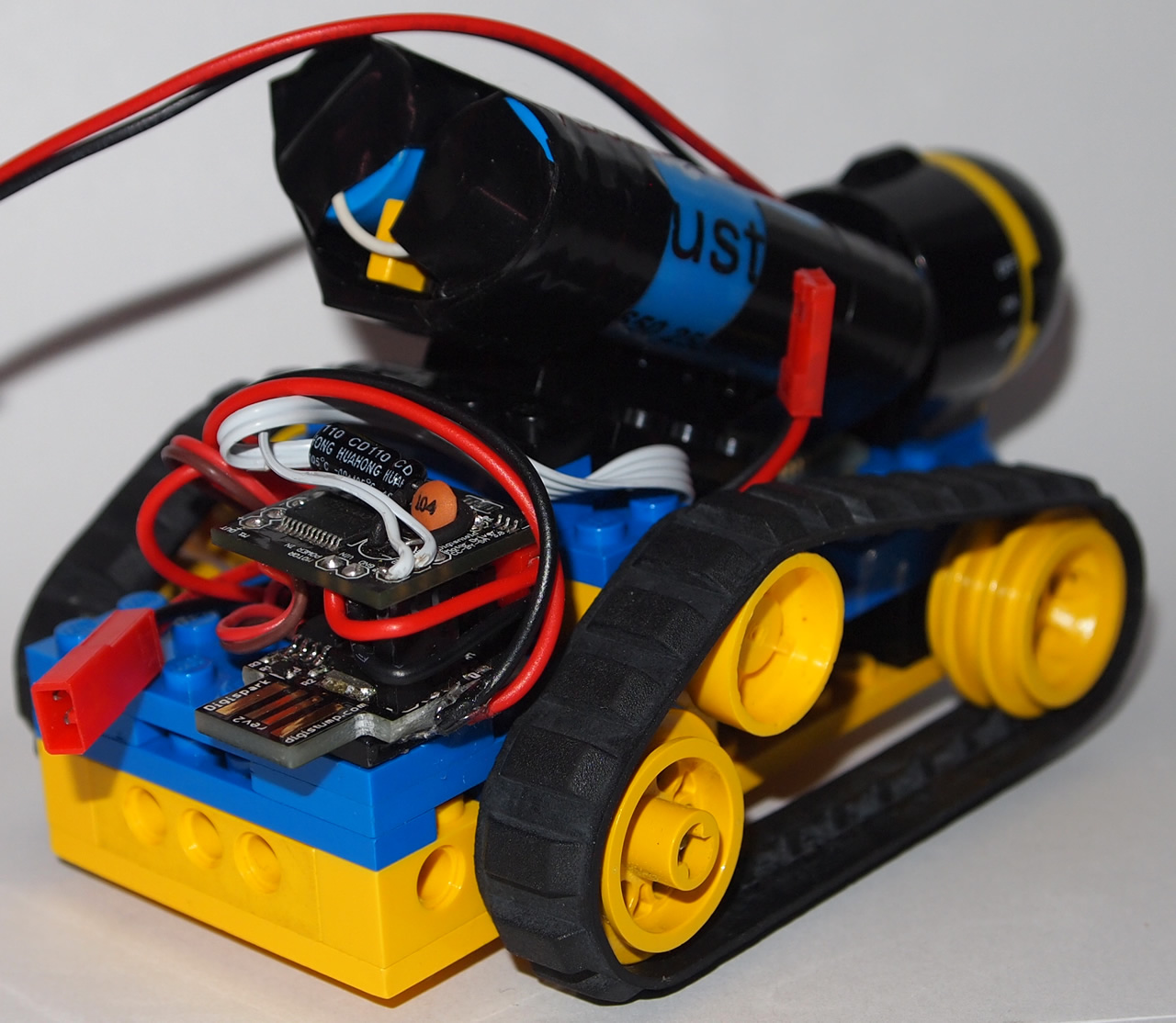
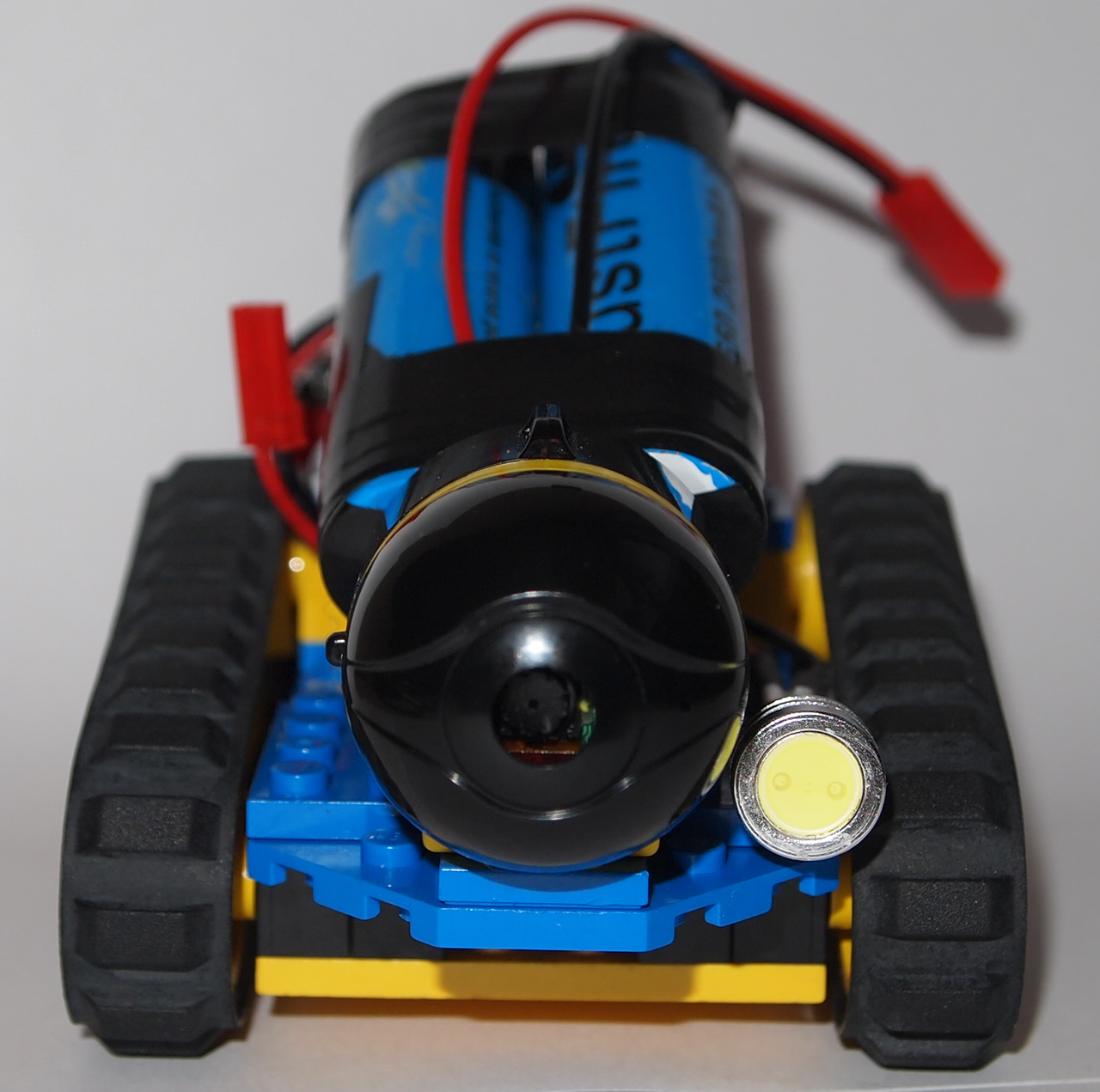
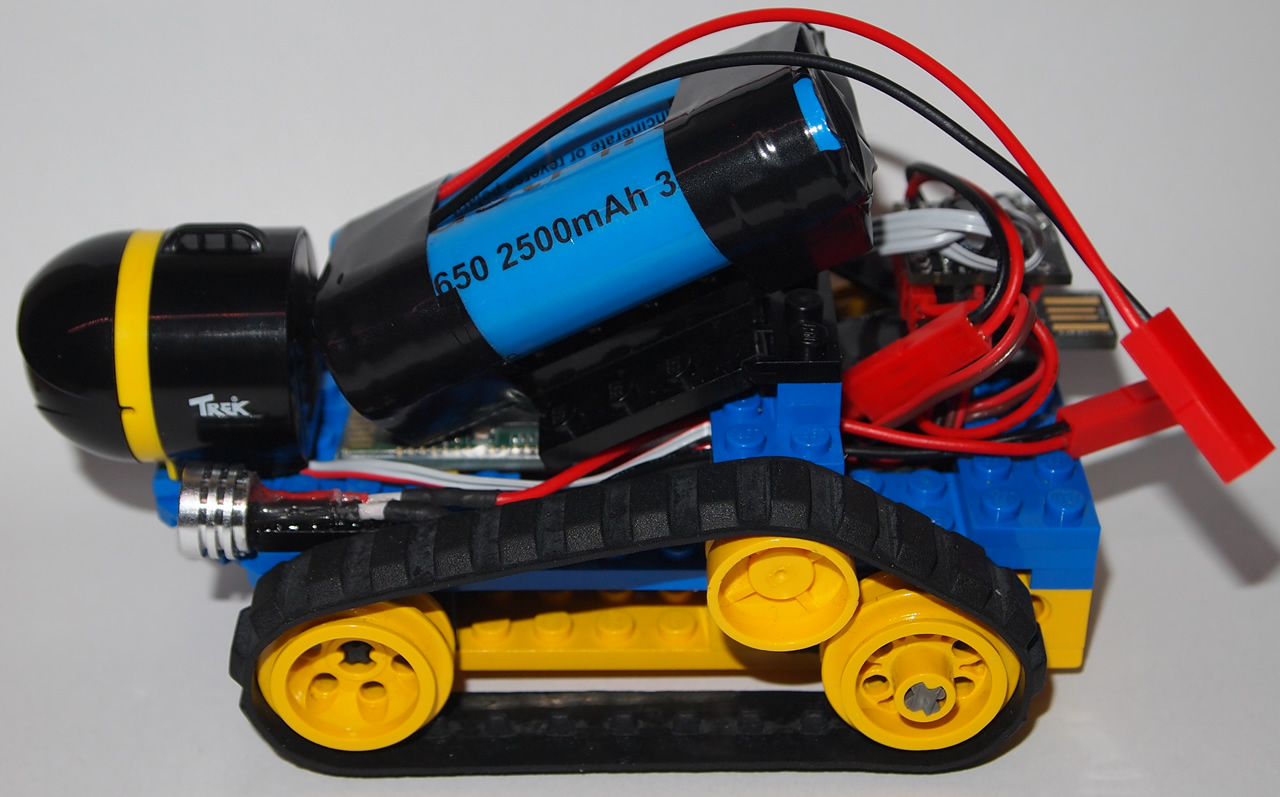
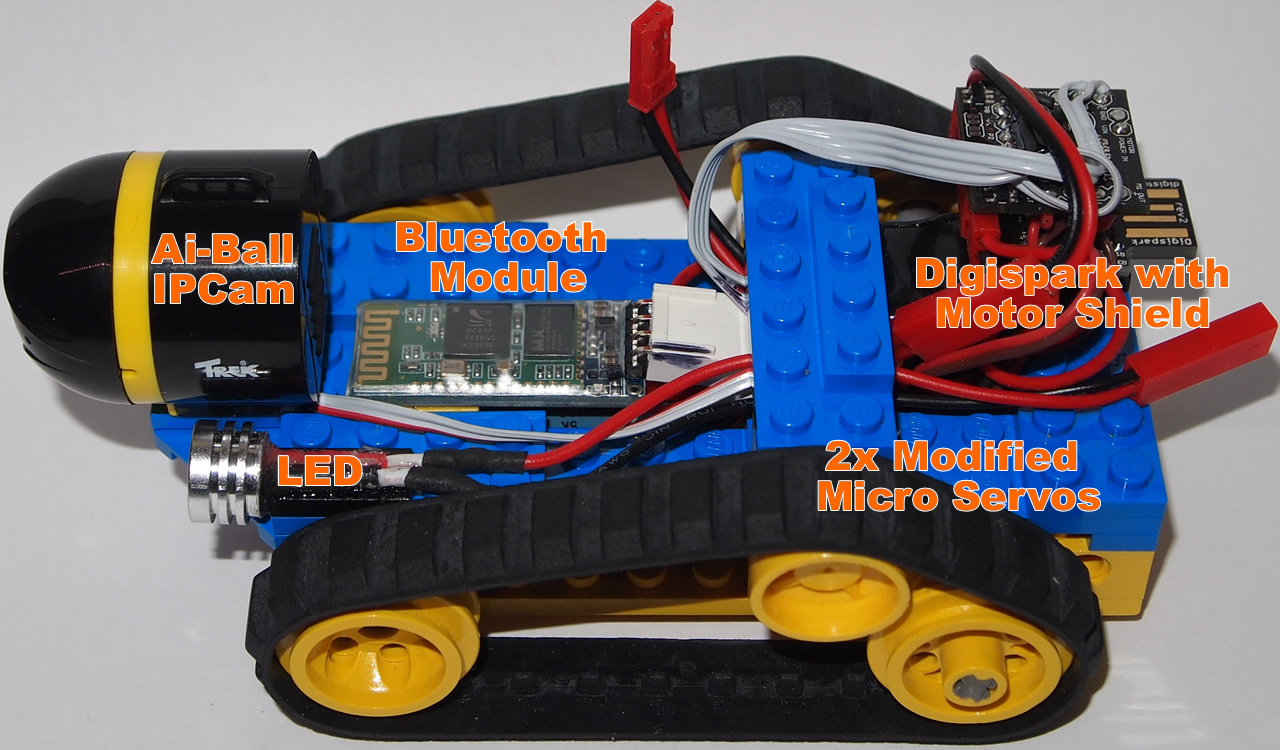
So,the bot looks like this

The claw on the front is home-made from metal wires. I used pliers to bend them,and used wood and paper to hold the pieces into proper place. There's a servo just under it to control the claw.

This is the first time I am working with Track belts.


The container for diamonds is just under the wooden "chassis."

The mechanism on the back side of the bot has a LDR and a High Power LED,between which a "diamond or stone" is inserted to check the transparency. The mechanism moves left and right, on both the sides,there are holes for the Diamonds/stones to fall. the hole on the side of the diamond has a container beneath it,while the one at the side of stone has none.( refer to the attachments and the video to understand better.)


I had a few previous designs too,in that I tried to use a conveyor belt,to replace the middle portion,which I was making at my home,but couldn't find enough time to complete it.


I had made another design too,but battery problem forced me to reject that design

Anyways,the bot uses micro magicians IR decoding library,to detect IR signals from a Sony remote and work accordingly. The robot is semi-autonomous. It is navigated via remote control,and does the mining work itself. I can also change the position of the claw (between REST and DOWN),making ti easier for the bot to control the mining process.
After the stones and the diamonds have been taken out of dirt,they are passed through the LDR and LED combo,to determine which one is diamond,and which one is rock.
The diagram is as follows.

The High Power LED can't be driven by the Atmega directly,so I'm using the TIP 122 to control it via the digital pin 9 (see above diagram).
Tools I have to work with,I cut the ply-wood with this saw. (This is the reason my bots don't look good,professional)


AND.......THIS is what I got from my crater.....:D :O :D :P

I actually have this in my home.


Problems:
1. IR signal does work over three meters,but sunlight tend to disrupt it.
2. The LDR sensor was not working properly under daylight conditions,until I changed a few codes.
3. The idea of this challenge as a whole is too complicated,I don't have the experience to tackle that,Still I've tried something.
Stay Update With : http://robot-parts.blogspot.com/
 Blog RSS Feed
Blog RSS Feed Via E-mail
Via E-mail Twitter
Twitter Facebook
Facebook
































{kind=link}
{kind=link}